Всем привет.
И так, я давненько уже делал робота, колеса в одном месте нашел, что то заказал, что то купил в другом месте…
Потихоньку собирал шасси будущего робота.
Робот затевался с 2мя ведущими колесами передней оси, сзади одно колесо, которое служит для ровновесия…
Мозги робота находятся на вот такой макетке…
Шасси я планировал делать с амортизаторами, которые тоже сделал сам…
За основу были вырезаны 2 вот такие детальки.
Вырезал из стенки системника…

О них чуть позже…
Колеса для большей плавности решил соединить металлической проволокой (мягкой) и затянуть сверху термоусадкой. Это позволило бы на большой скорости преодалевать любые (конечно разумные) неровности. В перспективе планировалось, чтобы и по обычному асфальту и по траве, робот себя уверенно чувствовал, а не только дома на ровном полу…
Как то так…
А вот что получилось

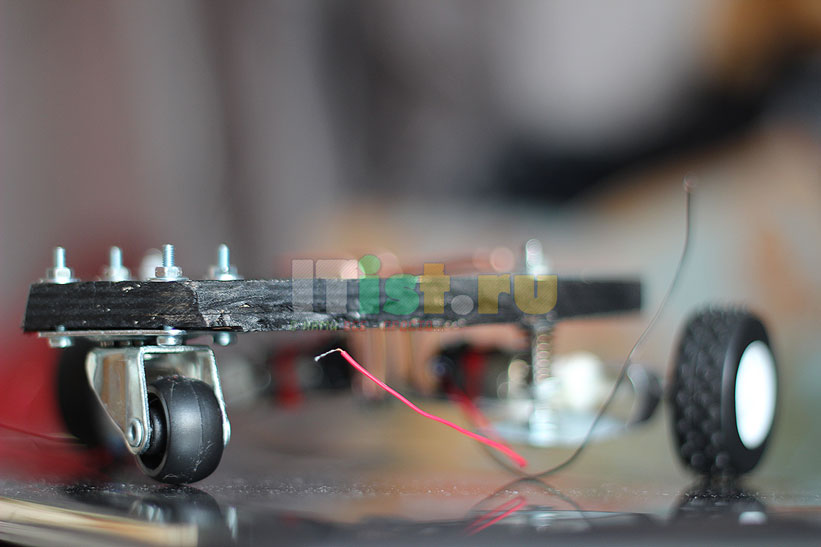
Ну и собственно в сборе с амортизатором. В нем используется строительный крепеж и запчасти от ВАЗа =)
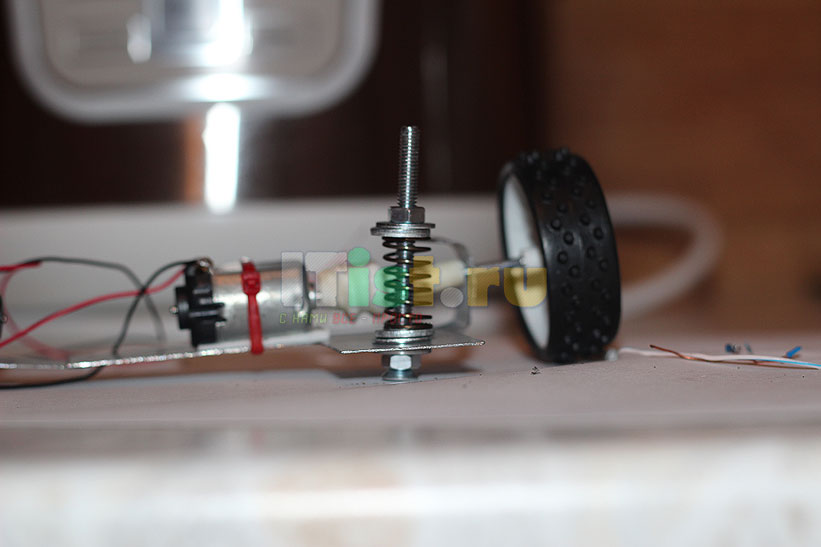
Вот еще одна фотка, как выглядит мой вариант грубо говоря подвески робота на ардуино, да и любой другой платформе (компактной), который мог бы передвигаться по разным типам местности…
И все это должно куда то крепиться, скажете Вы и будете правы!
Я решил это сделать с помощью листа фанеры.
Разметил, выпилил, высверлил отверстия под крепление элементов и получилось вот это…
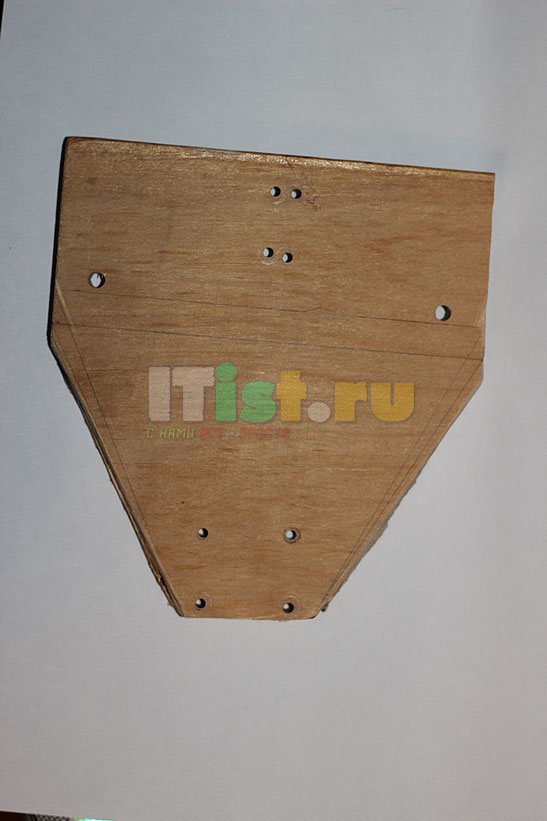
После этого, покрасил в черный цвет данную фанерку, и собрал…
Получилось вот это… На этом фото шасси робота показано как раз 3 колесо устойчивости.
Куплено в строительном магазине, в мебельной фурнитуре =)
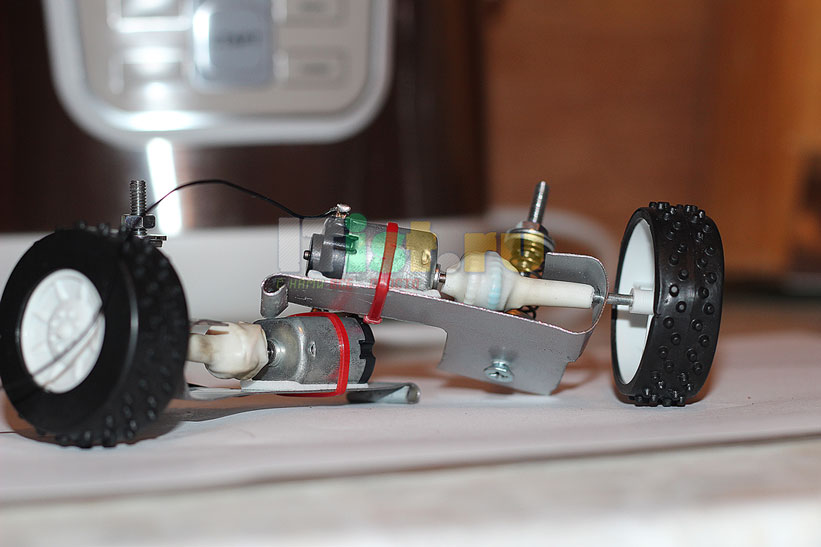
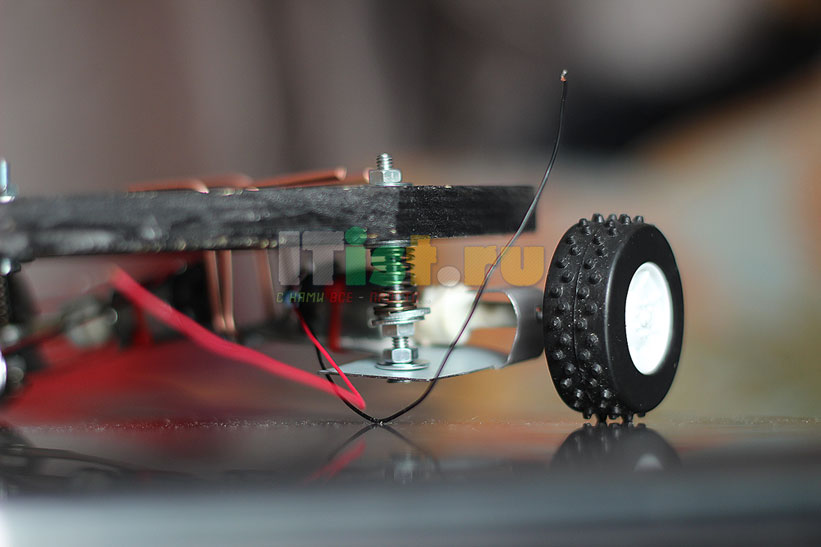
И вот еще одно фото, результата подвески для робота, с другого ракурса:
В заголовке статьи присутствует «эпик фэйл» и всем Вам наверное интересно, что же тут не так…
Тут все в полном порядке, косяк мой был в выборе моторов, потому что когда я написал тестовый скетч под двигатели, когда я проверял их работу и прочее, я не учел вес конструкции.
То есть мой робот просто ни куда не поехал… =(
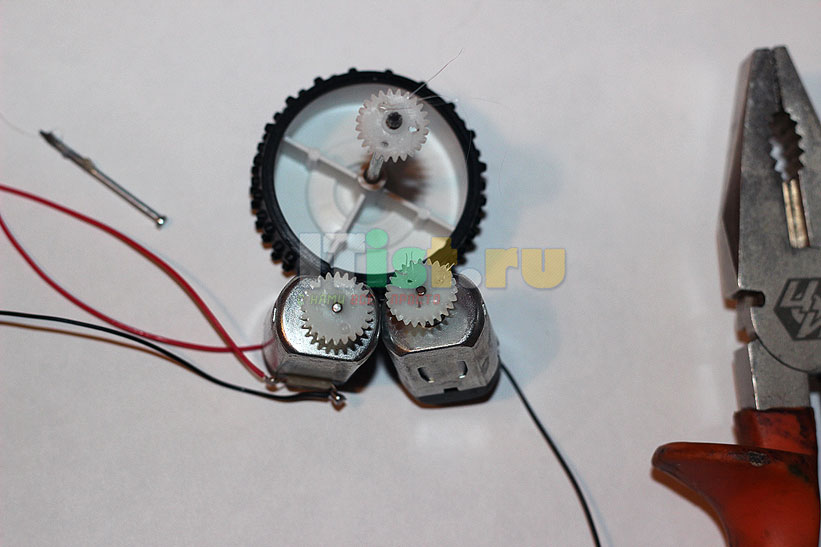
Ставишь его на пол, включаешь и ничего, лишь в тишине слышно как напряглись моторы, но ничего не происходит… После того как я его поднял, колеса начали крутиться и достаточно резво. Все дело в том, что я взял высокооборотистые моторы, которые подошли бы больше для разных коптеров. Выбирал я их из-за их дешевизны в первую очередь. Ну видимо моторы будут отправлены в долгий ящик. Их конечно можно использовать, только нужно увеличить крутящий момент, понизив их скорость с помощью редуктора.
Этим мне заниматься лень, и вместо моторов за 20 рублей, скоро будут приобретены моторы за 200 рублей, что сильно увеличивает цену конструкции. А я в первую очередь хотел сделать бюджетную модель, чтобы показать что это каждому по карману, и можно уложиться в построении робота если не в 500 рублей, так в 1000 точно! Сейчас это находится под вопросом.
В общем этот косяк с моторами несколько демотивировал меня по поводу строительства бюджетного робота на ардуино, но сейчас меня вроде поотпустило, да и нужно доделать проект, так как уже пришли «ништяки» для следующего робота.
Этот вариант будет упрощен, скорее всего аммортизаторы будут убраны для использовании в последующих версиях, например в том же коптере =)